A visual journey of the B1 balance bot, from early CAD designs and workbench electronics to the assembled physical hardware.

B1 CAD Design

Laying out B1 components
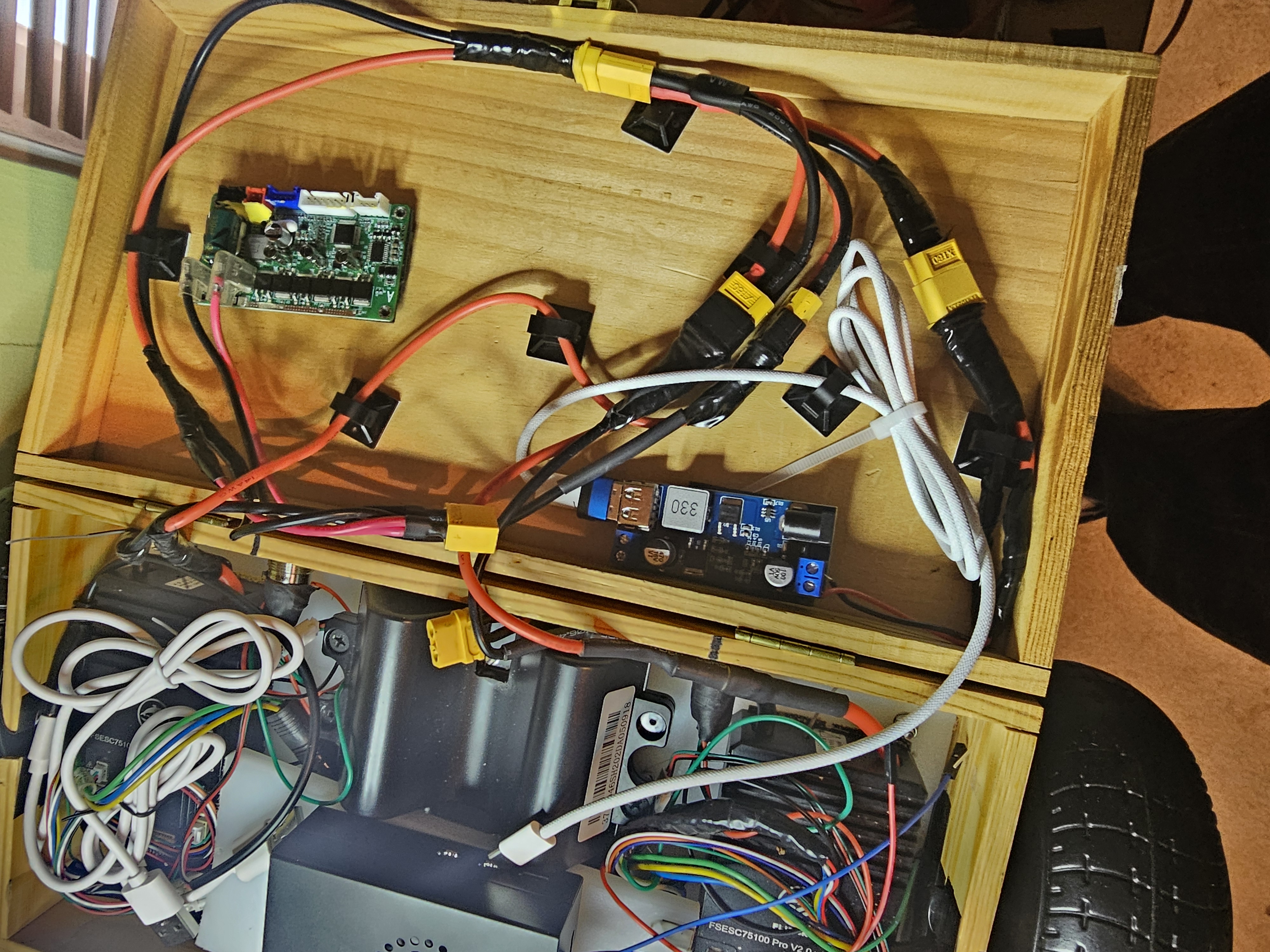
B1 open build
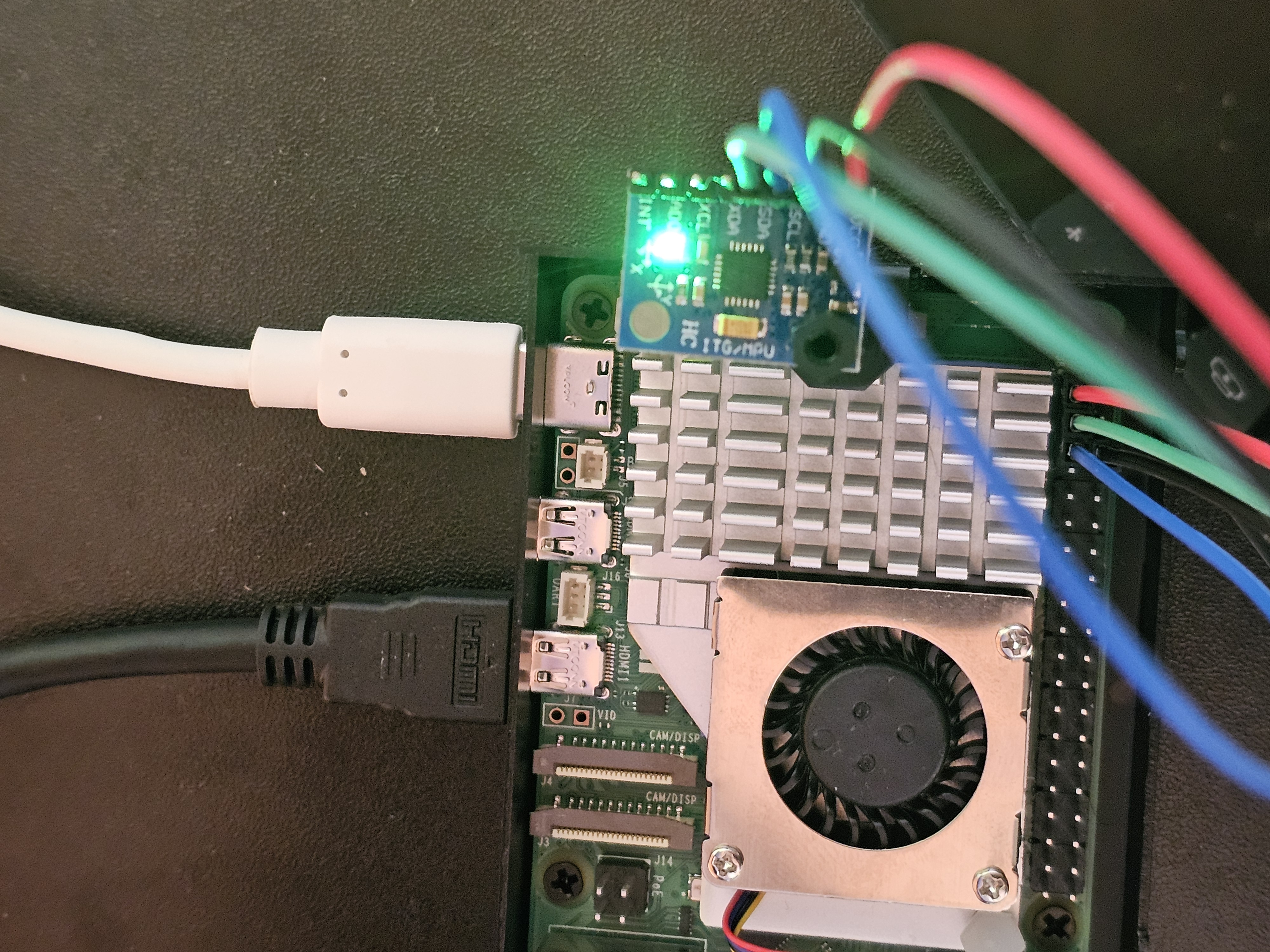
Raspberry Pi and IMU setup

B1 wheels mounted
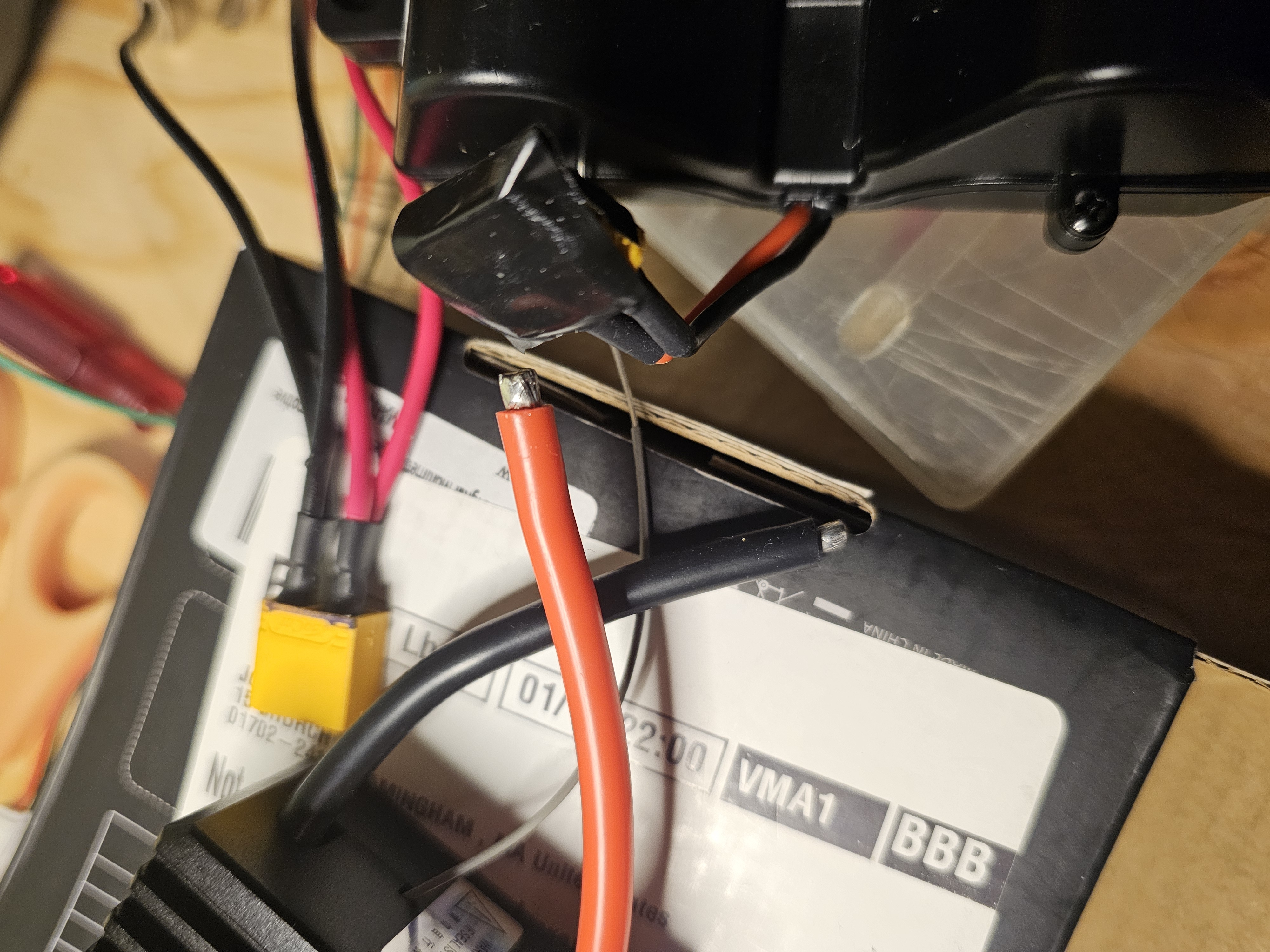
Motor wired

B1 standing
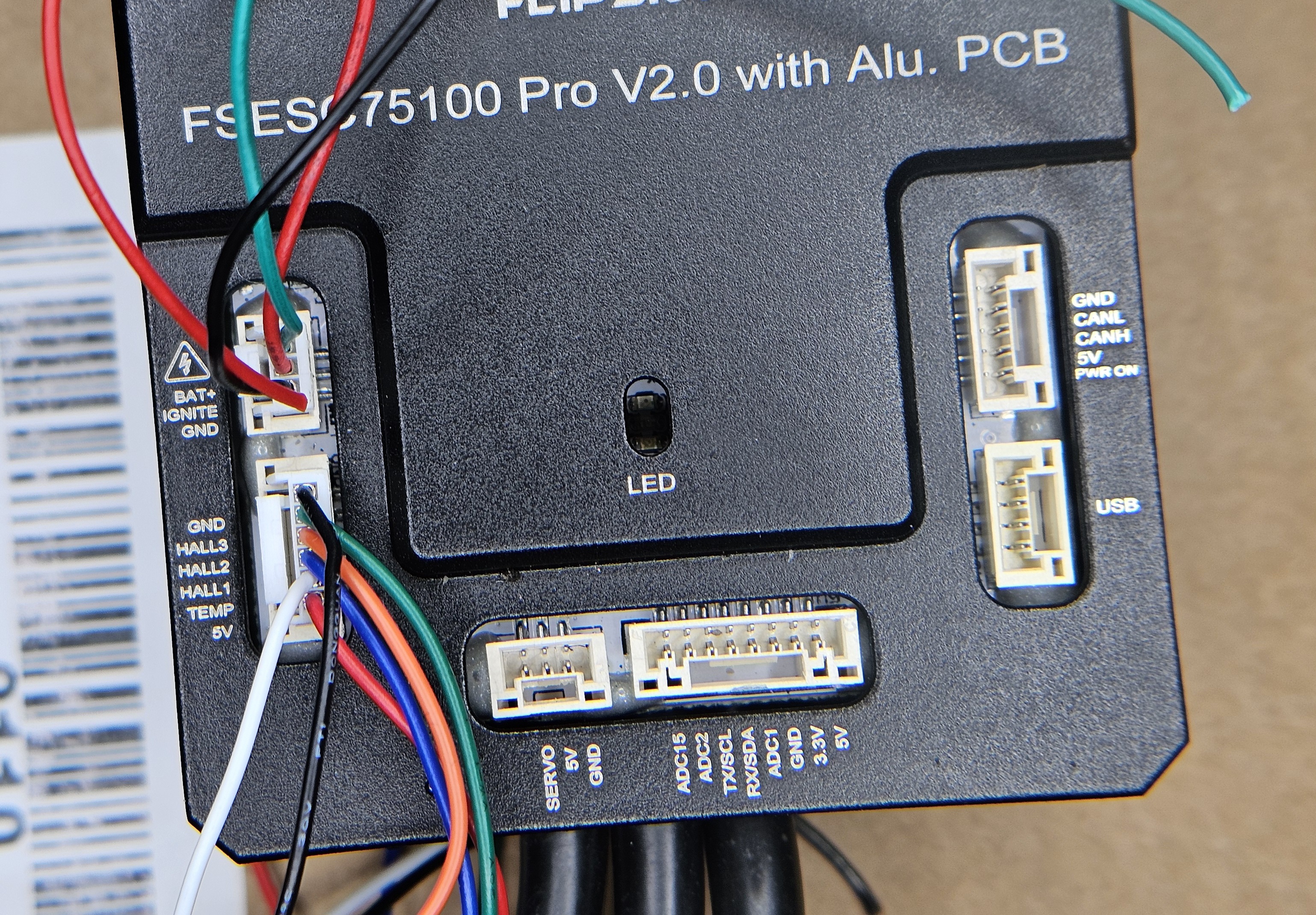
Flipsky VESC
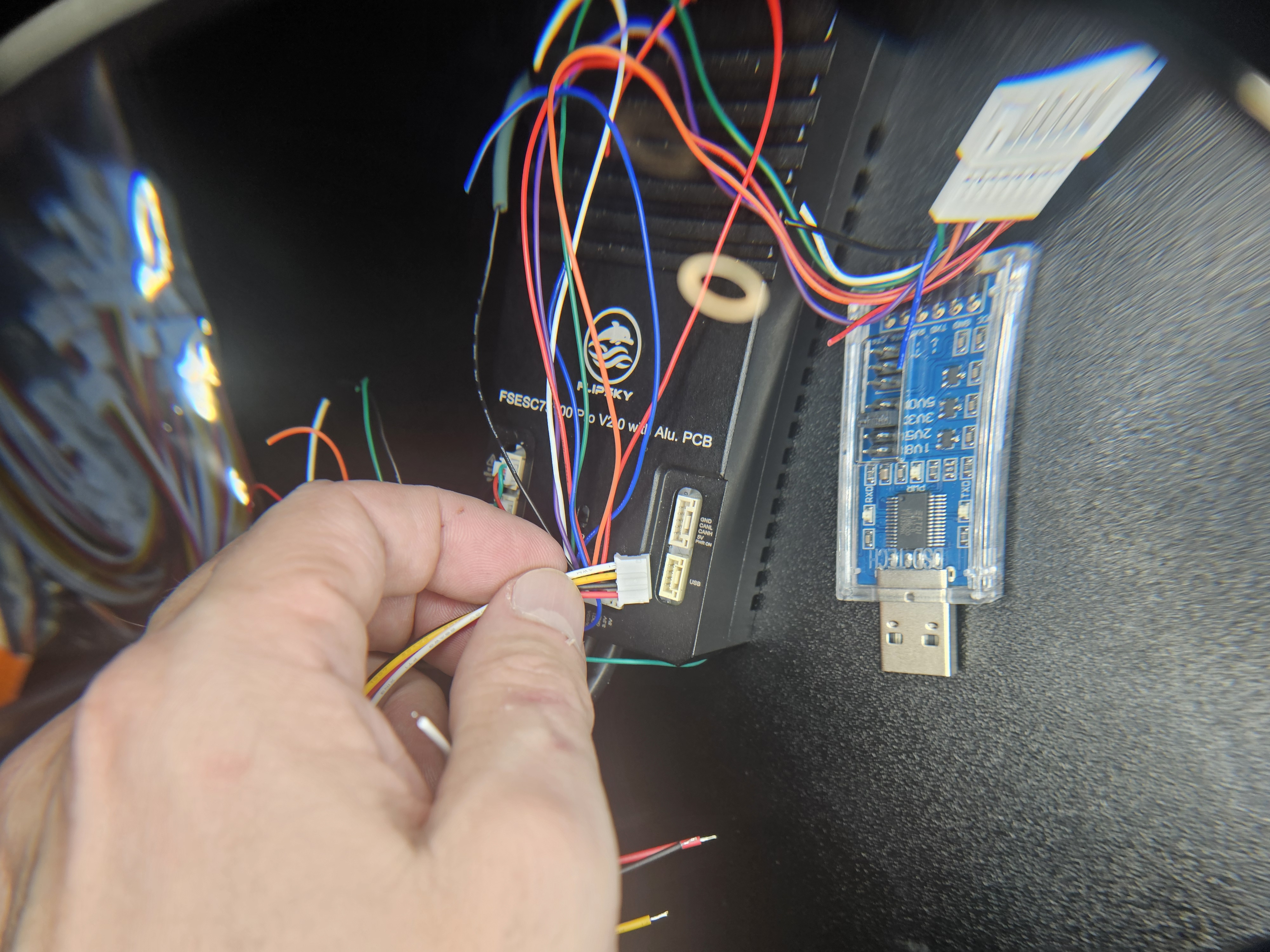
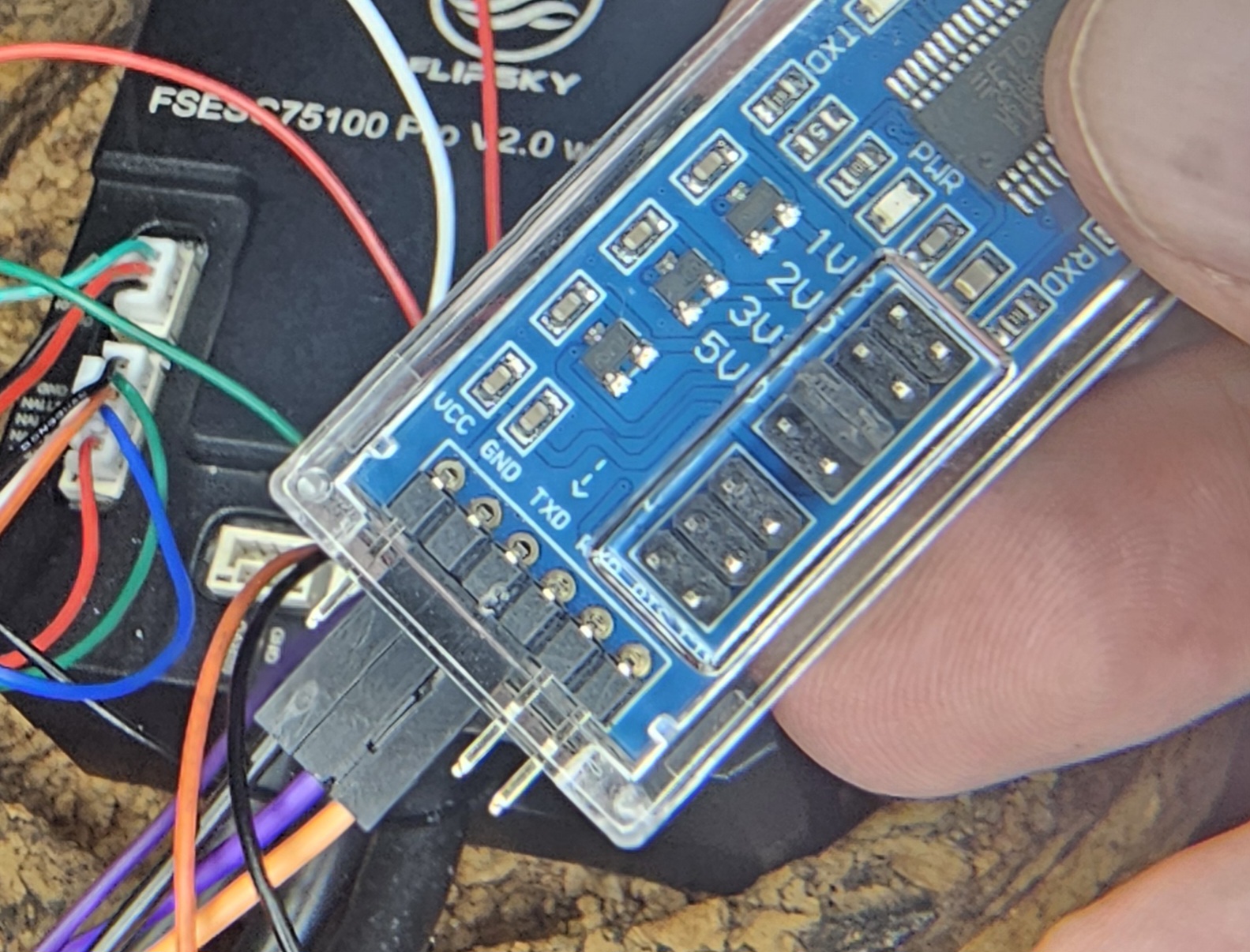
VESC wiring

Testing open wires

Raspberry Pi
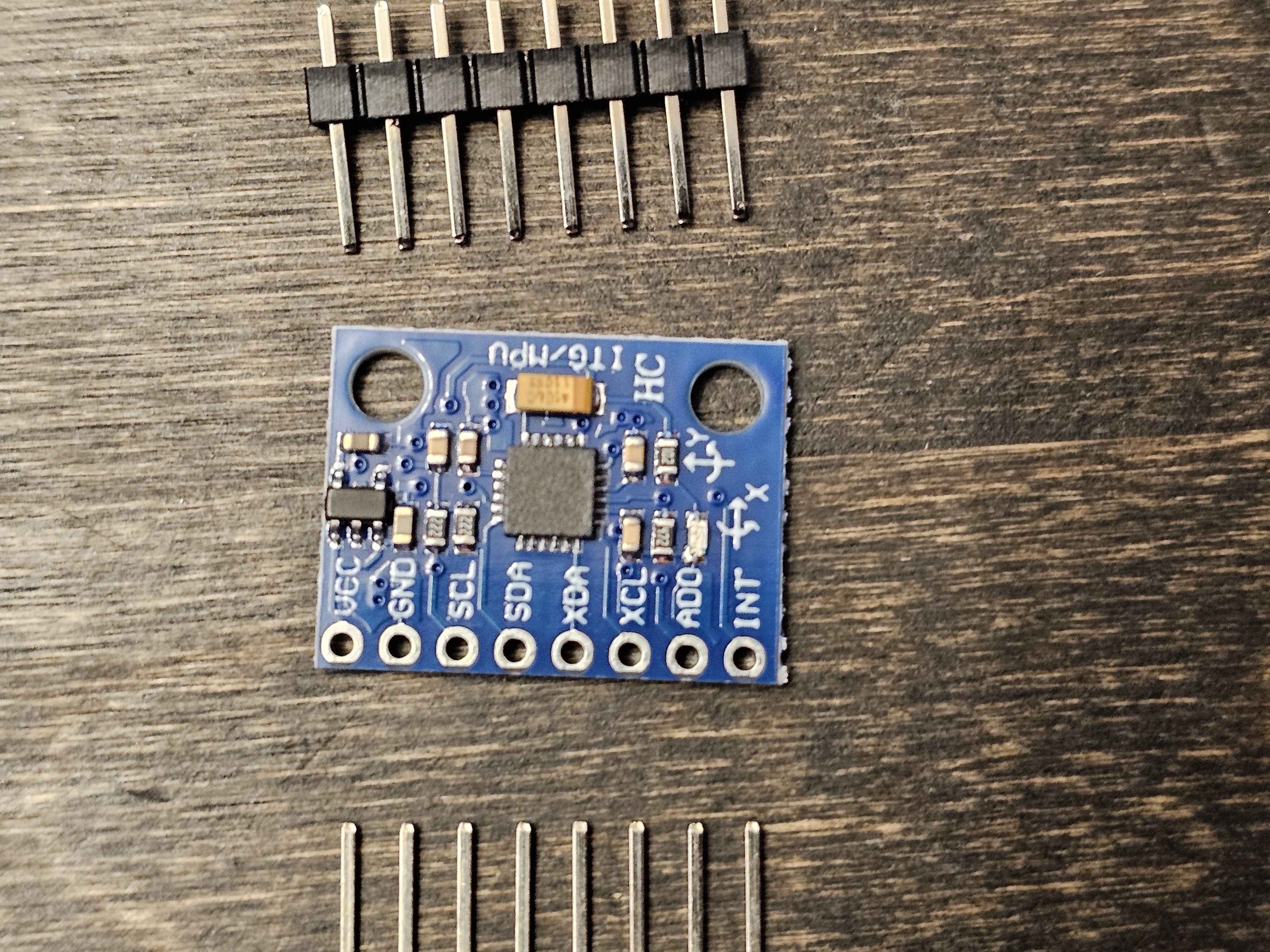
IMU close up
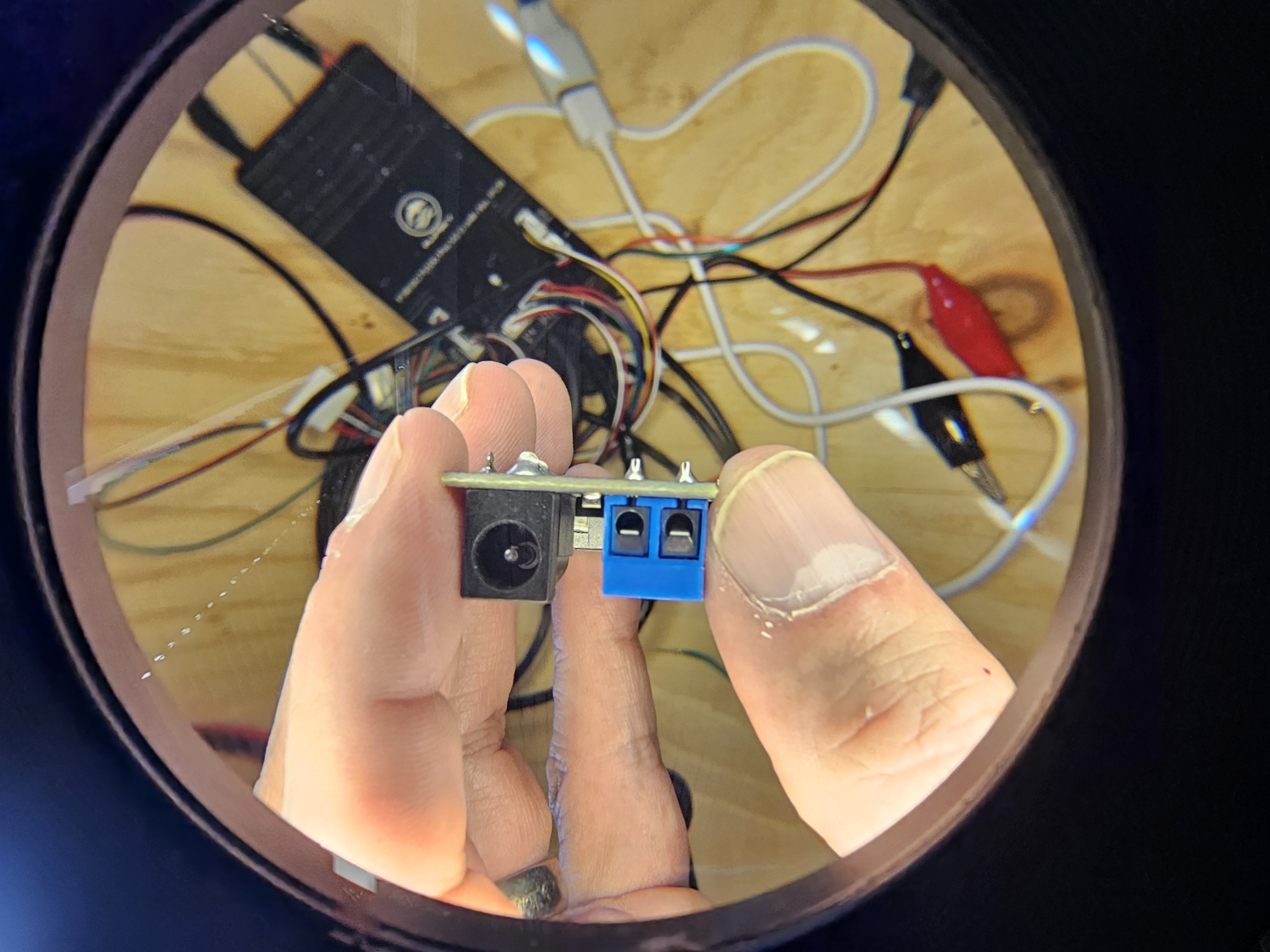
Buck converter

Desktop power supply
Random electronics

Random wiring

Calipers for measurement

Volt/Ohm meter